
プラスチックをベースにした電気で駆動するアクチュエータを「(電場応答性)高分子アクチュエータ」と呼ぶ。 高分子アクチュエータは、金属製のモータなどと違い軽量で柔軟であり、人工筋肉の有力候補でもある。 その特徴を生かして、生物を模したロボットやマイクロマシンに使用することが期待されている。
高分子アクチュエータの代表格は、本研究室でも研究しているIPMCだが、 IPMCは乾燥に弱く長時間空気中で使うことができない。また、作成過程でめっき処理が必要なため手間もかかる。 これに対して、「カーボンナノチューブ/イオン液体ゲルアクチュエータ」または、 「バッキーゲルアクチュエータ」と呼ばれる新しい高分子アクチュエータは、空気中で使用することができ、 作成もしやすいという特徴をもっている。
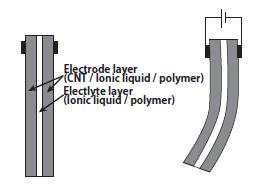
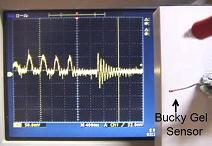
バッキーゲルアクチュエータは、電解質層を電極層で挟んだサンドイッチ構造をしている(図1)。 両側の電極層に3Vほどの電圧を加えると素子が屈曲する(図2)。また逆に、外からの力で素子を屈曲させると 0.01mV程の電位差が発生するため、センサとしても使用できる(図3)。
 |
|---|
| 図1:バッキーゲル素子の構造 |
 |
 |
|---|---|
| 図2:アクチュエータ機能 | 図3:センサ機能 |
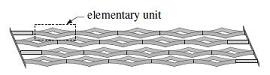
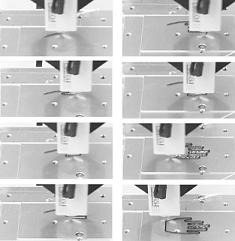
本研究室では、バッキーゲル素子のアクチュエータ機能とセンサ機能の統合・集積化を研究している(図4)。 同一素子でのアクチュエータ・センサ統合系の実現は、高分子アクチュエータの軽量性、柔軟性を生かした応用が期待できる。 また、このような素子の実現に向けて液体塗布ロボットを使って、複雑な形状の素子を作成する研究も行っている(図5)。
 |
 |
|---|---|
| 図4:集積化の例(直動化への応用) | 図5:液体塗布ロボットによる成形 |
