
プラスチックをベースにした電気で駆動するアクチュエータを「(電場応答性)高分子アクチュエータ」と呼ぶ。 高分子アクチュエータは、金属製のモータなどと違い軽量で柔軟であり、人工筋肉の有力候補でもある。 その特徴を生かして、生物を模したロボットやマイクロマシンに使用することが期待されている。
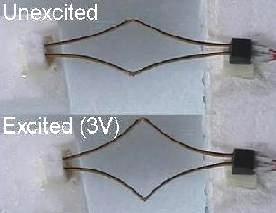
高分子アクチュエータの1つとしてイオン導電性高分子・貴金属接合体(Ionic Polymer-Metal Composite:IPMC)がある。 IPMCはフッ素系イオン交換樹脂膜の表面に金や白金などの貴金属を接合したもので、 その接合体に対して1〜2V 程度の低電圧を加えることで高速に屈曲する(図1)。 IPMCは以下のような特徴があり、実用的なソフトアクチュエータ材料の1つである。
- 低電圧で駆動する (1〜2 V)
- 応答速度が速い (> 100 Hz)
- 耐久性・化学的安定性がある
- 柔軟性がある
- 水中での動作が可能である
- 動作音がない
 |
|---|
| 図1:IPMCの屈曲動作 |
動画
- IPMC膜の基本動作実験 1 [ステップ応答/2V](1.4MB)
- IPMC膜の基本動作実験 2 [矩形波応答/2V](2.6MB)
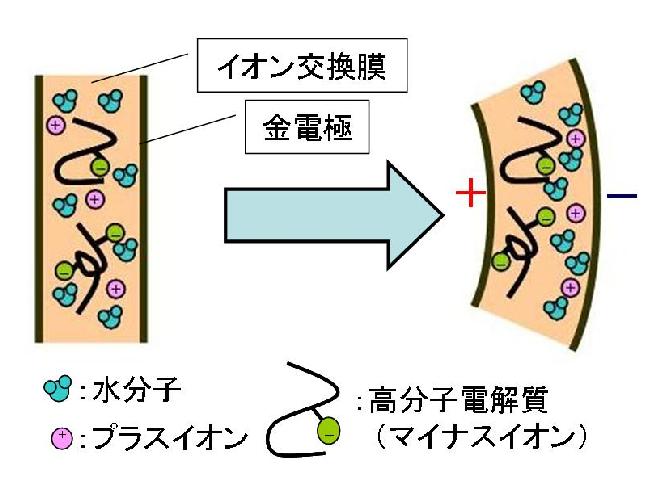
IPMC膜に一定電圧を加えた場合、プラス極側へ素早く屈曲し、その後ゆっくりと反対側へ戻るという挙動を示す。 この動作の原理は「プラスイオンの移動に伴う水分子の移動」モデルとして考えることができる。図2に示すように、 電圧を加えると高分子内を動くことのできるプラスイオン(カウンターイオン)が水分子とともに動き、 マイナス極側の含水率が高まり、その膨潤圧によりIPMC膜はプラス極側へ屈曲する。 その後水分子が圧力に押し戻されてゆっくりと戻る。 これらの挙動は高分子膜の種類やカウンターイオン、電極の種類によっても異なることがわかっている。
 |
|---|
| 図2:IPMCの動作原理 |
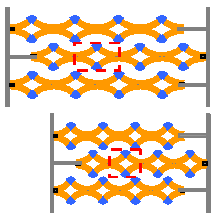
本研究では、屈曲運動するIPMCを用いて直動運動するアクチュエータ機構を作製している(図3)。 基本ユニットは直列や並列に接続することによって必要な変位や出力を得ることが出来きる(図4)。
 |
 |
|---|---|
| 図3:直動アクチュエータの基本ユニット | 図4:直動アクチュエータの接続 |
動画
- 直動アクチュエータの基本動作実験 1 [ステップ応答/3V](2.0MB)
- 直動アクチュエータの基本動作実験 2 [矩形波応答/3V](5.2MB)
IPMCの応用研究として、ロボットへの応用とその制御について研究を行っている。
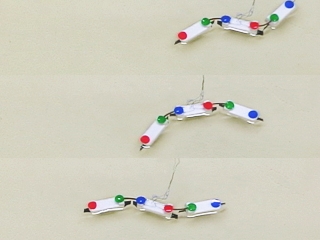
図5は直動型アクチュエータを用いた小型コンパス型歩行ロボットである。
図6は水中で動く蛇型ロボットである。IPMCは水中に含まれるプラスイオン(カウンターイオン)の種類によって、 動作特性が変化することが知られており、カウンターイオンを変えることで蛇型ロボットの動作が どのように変わるか研究を行った。
図7は魚のヒレを模したロボットである。環境が変化してもヒレが生み出す推進力が最大になるように IPMCの制御を行った。
 |
|---|
| 図5:IPMCによる二足歩行機 |
 |
 |
|---|---|
| 図6:IPMCによる蛇ロボット | 図7:IPMCによる魚のヒレを模したロボット |
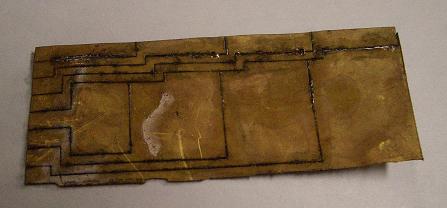
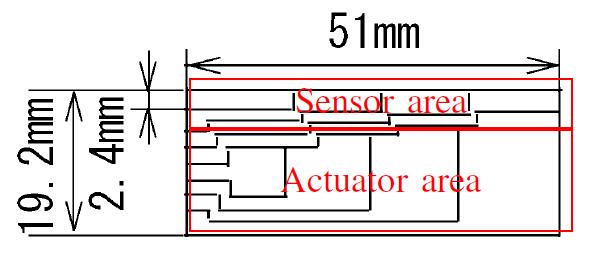
IPMCはアクチュエータ機能とは逆に、外からの力で素子を屈曲させると1mV程の電位差が発生するためセンサとしても使用できる。 同一素子上でアクチュエータ機能とセンサ機能が実現できれば、IPMCの柔軟性を生かしたままロボットなどでの使用がしやすくなる。
そこで本研究室では、IPMC表面の電極層をレーザーで切断し電気的に絶縁することで、 1枚のIPMCに複数のセンサとアクチュエータを実装した素子の作成を行っている(図8,9)。
 |
 |
|---|---|
| 図8:センサ・アクチュエータ統合型IPMC | 図9:統合型IPMCの概要 |
