
1. 目的
キットに含まれている減速機付きモータの静特性を測定し、マシン駆動系の設計の基礎を習得する。
2. 実験課題
以降の説明をよく理解した上で、用意された減速機付きモータについて以下の実験を行う。
-
電源電圧-無負荷回転角速度の測定
-
電源電圧をパラメータとするトルク-角速度およびトルク-電流特性の測定
-
電源電圧をパラメータとする特性線図の作成
3. 原理
3.1. 電流・電圧の測定方法
駆動用電源には用意された実験用の直流安定化電源を電圧源モードにして用いる。電源電圧(\(v\)[V])と電流(\(i\)[A])は電源装置の表示を読めばよい。
3.2. 出力角速度の測定方法
出力角速度(\(\Omega\)[rad/s])は適当な回転数だけドラムが回るのにかかる時間を時計で測り、算出する。
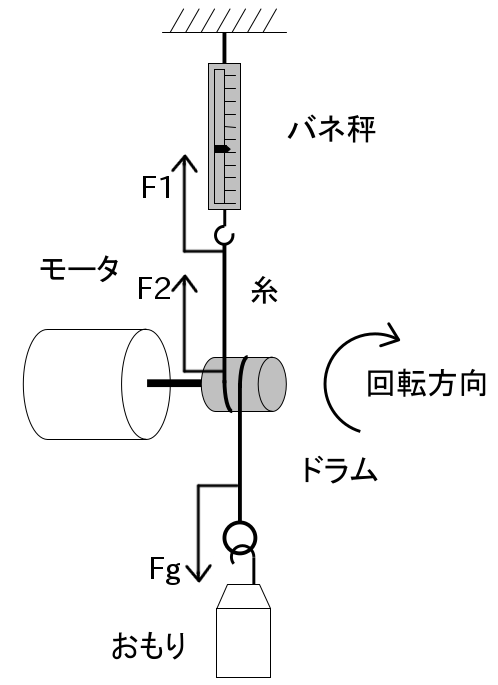
3.3. 出力トルクの測定方法
[実験装置] のようにモータに取り付けられたドラムに糸を巻きつけ、モータを回す。すると糸はドラムに対して滑り、そこに摩擦が生じる。このときのおもりは
-
秤が糸を引く力(\(F_1\)[N])
-
ドラムが摩擦で糸を引く力(\(F_2\)[N])
の二つの力によって重力(\(F_g\)[N])とつりあい、一点にとどまっている。この摩擦はそのままモータにかかる負荷となっている。したがってモータにかかる負荷(\(\equiv F_2\))は、
と求めることができる。このときドラムの半径を\(R\) [m] [1] とすると、モータの出力トルク\(T\)[N・m]は
で計算できる。
4. 手順
4.2. 電源電圧-無負荷回転速度、および電源電圧-無負荷電流特性の測定
初めにドラムに糸をかけない状態で、無負荷特性を測定する。電源電圧を0[V]に設定して、徐々に上げていく。定常回転になったところで無負荷回転角速度(\(\Omega_0\))、および無負荷モータ電流(\(i_0\))を測定する。
以上を2[V]刻みで電源電圧を変えて行う。モータの定格は12[V]なので、電圧は0 ~ 12[V]の範囲で変える。 [3]
なお、 測定と同時に \(v-\Omega_0\) グラフ、\(v-i_0\) グラフにデータをプロットし、結果を確認しながらすすめること 。
4.3. 電源電圧をパラメータとする、トルク-角速度、およびトルク-電流特性の測定
[実験装置] を参考にして糸を巻き、おもりをセットする。おもりは用意されているものを組み合わせる。用意したおもりは大・中・小の3種類で、1, 0.5, 0.25[kg] に高精度に調整済みである。[4]
|
注意事項
|
|
用意したおもりの合計以上のおもりをぶらさげない。実験装置が曲がる恐れがある。 |
|
おもりの重さの合計がバネ秤の計測レンジを超える場合もあるので注意。 |
|
おもりの組み合わせ(特に3つとも使った場合)によっては実験装置が倒れやすいので注意。 |
[実験装置] のようにセットした状態で電源を0[V] から徐々に上げ、モータを回転させながら [電源電圧-無負荷回転速度、および電源電圧-無負荷電流特性の測定] で測定したときと同じ電圧値のいずれかにセットする。そして、
を測定する。ここでも グラフ(\(T-\Omega, T-i\))にプロットし、結果を確認しながら測定すること 。
一つの電源電圧に対して特性曲線を書くのに十分なデータが得られるまで、[電源電圧をパラメータとする、トルク-角速度、およびトルク-電流特性の測定] に戻っておもりと糸の巻き数の組み合わせを変えてこの測定を繰り返す。 [7]
十分にデータがとれたら電源電圧を変えて測定を続ける。 [8]