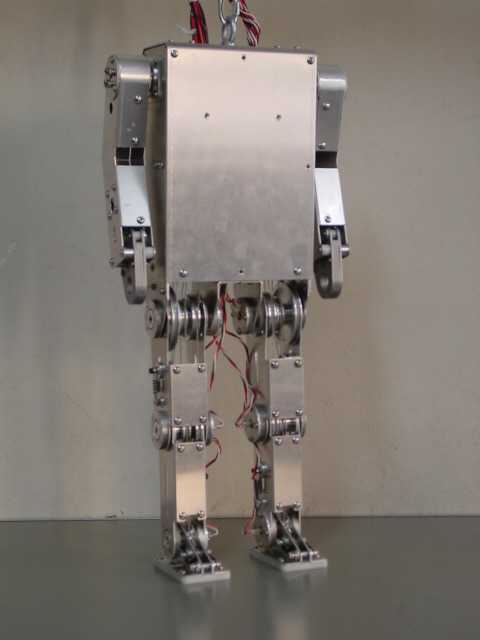
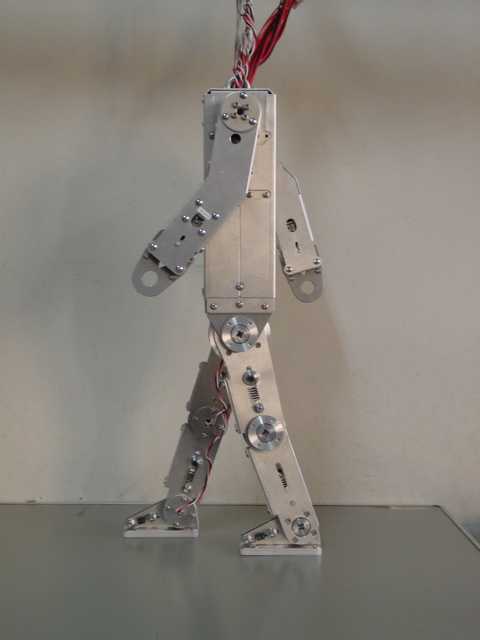
SMB(Super Mechano Boy)
[アクロバット・ロボット]
劣駆動ロボット (9リンク・8関節)
全長約50cm, 重量約4kg
ワイヤ干渉駆動機構
広瀬・米田研究室(機械宇宙専攻)設計
[実験ビデオ / シミュレーション]
倒立(2link/1min)
(11.5MB)
倒立(2link/1min/short-version)
(5.31MB)
倒立(3link/25sec/2link-ctrl + PD-ctrl)
(5.58MB)
倒立(3link/15sec/3link-ctrl)
(3.28MB)
大車輪
(3.06MB)
飛び出し・宙返り(手動飛び出し)
(610kB)
飛び出し・宙返り
(4.67MB)
屈伸デモ
(3.69MB)
着地予備実験 1
(10.7MB)
着地予備実験 2
(3.14MB)
空中回転姿勢制御シミュレーション(最適な飛び出し)
(839kB)
空中回転姿勢制御シミュレーション(制御なし)
(839kB)
空中回転姿勢制御シミュレーション(制御あり)
(839kB)
爪先立ち着地制御シミュレーション
(1.7MB)
山北研 COE/SMS 関連ページへ戻る
Yamakita Lab.
Department of Control and System Engineering
Tokyo Institute of Technology