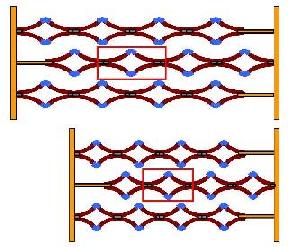
IPMC Actuator
イオン導電性高分子・貴金属接合体(IPMC)を用いた直動人工筋アクチュエータの 開発を行っています。ロボットなどの機械系へ適用することを目指しています。
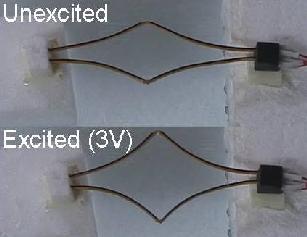
実験結果
ステップ応答 [3V]
(2.0MB)
矩形波応答 [3V]
(5.2MB)
シミュレーション結果
斜面での歩行 [0.2倍速]
(1.3MB)
平地歩行 [0.2倍速]
(2.4MB)
山北研 COE/SMS 関連ページへ戻る
Yamakita Lab.
Department of Control and System Engineering
Tokyo Institute of Technology